































الفائز العام: فريق Bullseye من جامعة Wageningen ، هولندا ؛ مهام حرة مع مفاهيم رؤى ؛ أثبتت المحاكاة الميدانية أنها تمثل تحديًا له فوائد تعليمية كبيرة ؛ أكثر من 500 مشاهد دولي عبر الإنترنت على مدار ثلاثة أيام
(DLG) بالاشتراك مع DLG Feldtage ، وفي هذا العام ، ولأول مرة ، تم عقده في شكل افتراضي على منصة DLG الرقمية ، انتهى الحدث الدولي الثامن عشر للروبوت الميداني ، وهو مسابقة روبوت ميدانية لفرق الطلاب الدوليين ، بإعلان عن الفائزون ، قدمهم المنظمون ، جامعة هوهنهايم وجامعة فاغينينغين. الفائز العام في حدث 18 هو فريق Bullseye من جامعة Wageningen بهولندا ، والذي تم الحكم عليه بناءً على أدائه في أربع مهام ميدانية محددة تضمنت التنقل في صفوف الذرة المنحنية ، في صفوف مستقيمة مع أو بدون نباتات مفقودة ، والتعرف على الأعشاب الضارة والقمامة والإزالة اللاحقة إلى الرأس. لقد فاز فريق سيريس بجامعة مونستر للعلوم التطبيقية ، وهو حدث اختياري يسمح لفرق الطلاب بإظهار براعتهم الهندسية في حل مهمة زراعية مختارة ذاتيًا ، من خلال روبوت الحصاد الخاص به الذي كان قادرًا على اكتشاف واختيار القرع. .
شاهد 518 مشاهدًا دوليًا
استقطب الحدث 518 مشاهد من جميع أنحاء العالم ، ولم يشملوا فقط المتخصصين التقنيين والأكاديميين والمهندسين وموظفي الجامعات والطلاب ، ولكن أيضًا مزارعين من مجموعة من البلدان. كما حضر المشاركون في الصناعة ، مثل مديري المنتجات ، الحدث المباشر ، الذي تمت تغطيته من قبل الصحفيين الدوليين ، حيث قاموا بضبط أداء الروبوتات في بيئة محاكاة واقعية للصور مماثلة لتلك التي تستخدمها ناسا لاستكشاف الفضاء. من خلال الدردشة الحية ، أتيحت للمشاهدين فرصة التفاعل مع 14 فريقًا دوليًا من الدنمارك وألمانيا وهولندا ورومانيا وسلوفينيا ، بالإضافة إلى الخبراء والمشاهدين الآخرين.
جائزة التعاون لتطوير حقول الذرة الافتراضية
مُنحت جائزة التعاون الفخرية إلى Kamaro Engineering ، وهو فريق طلابي هندسي لروبوتات ميدانية مبتكرة من معهد كارلسروه للتكنولوجيا (KIT). تعترف جائزة التعاون بالمساهمة في تطوير حقل الذرة الافتراضي في البيئات المحاكاة. تضمن هذا العمل كتابة كود يصف بدقة ما يبدو عليه نبات الذرة والمكونات الأخرى بالإضافة إلى إنشاء تأثيرات واقعية مثل الرياح والظلال لسن مجموعة من سيناريوهات المجال الزراعي ، وخاصة التعرف على الأعشاب الضارة واكتشاف العوائق.
فريقان من المواهب في سن المدرسة
هذا العام ، تألف فريقان - Carbonite و Camper Robotic - من أطفال في سن المدرسة يتمتعون بمواهب فنية من مدينتي هامبورغ وأوبرلينجن الألمانيتين على التوالي. طور فريق Camper Robotic نوعًا فريدًا من نوع "Segway" من الروبوت يسمى Field Balancer. برع فريق Carbonite في العديد من المهام ، واحتل المركز الثالث بشكل عام.
"كان هذا الحدث الافتراضي عرضًا أوليًا ونحن سعداء جدًا بالنتيجة وردود الفعل من الطلاب. تمثل البيئة المحاكية جزءًا كبيرًا من أعمال التطوير للروبوت الميداني. أعتقد أن هذا الحدث ، الذي يقام مباشرة في بيئة محاكاة ، يعد تمرينًا رائعًا وصعبًا ليس فقط لتحديد ما هو قادر على النظام ولكن أيضًا قياسه مع الفرق الأخرى. قال البروفيسور هانز دبليو غريبينتروج ، مدير قسم التكنولوجيا في إنتاج المحاصيل ، جامعة هوهنهايم ، ألمانيا ، "سيكون لهذا فوائد تعليمية كبيرة لعدة أشهر قادمة".
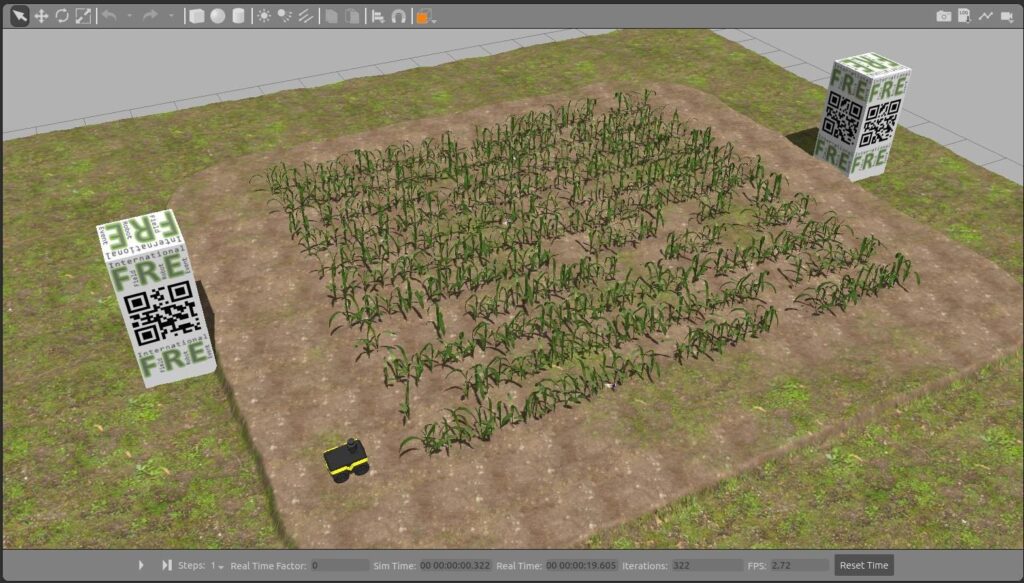
"كانت بيئات محاكاة ROS Gazebo ، التي أنشأناها خصيصًا لهذا الحدث ، مفيدة لفرق الطلاب ، وبالتالي قررنا إبقائها متاحة بعد المسابقة ، حتى يتمكن الطلاب من اختبار محاكاة الروبوتات الميدانية المستقبلية على تلك المنصة ، "اختتم البروفيسور غريبينتروج.
فعالية حرة - مفاهيم المستقبل
دائمًا ما تكون مهمة السباحة الحرة في الحدث بمثابة تسليط الضوء على المتفرجين وتوفر نافذة على المستقبل بمفاهيم رؤوية للتطبيقات الميدانية ، يتم اختيارها وتطويرها من قبل الفرق نفسها. فئة اختيارية في المسابقة ، أتاحت المهمة لفرق الطلاب الفرصة لإظهار مهاراتهم في تطوير حل لمهمة ميدانية عملية من اختيارهم. في حدث هذا العام ، قدم الطلاب مهام السباحة الحرة على شكل مقاطع فيديو. تضمنت مهام الأسلوب الحر روبوت حصاد من سيريس ، ليفوز بفئة السباحة الحرة. ثانيًا ، تم تطويره بواسطة فريق FarmBeast بجامعة ماريبور ، وهو عبارة عن تطبيق رش قادر على التعرف على الحشائش ورش الهدف فقط عند الحاجة ، مما يساهم في حماية التربة. في المركز الثالث ، كان فريق Kamaro مع الروبوت الميداني Beteigeuze ، يقدم نفسه على أنه روبوت ميداني معياري ذاتي التكوين مع ملحقات متعددة ، بما في ذلك الأدوات القائمة على المقطورة.
حدث الروبوت الميداني الدولي هو مسابقة روبوت ميدانية دولية تشمل مهام ميدانية مختلفة. يعد التنقل في الروبوت بين صفوف المحاصيل المنحنية ، والتعرف على الأشياء التي هي حشائش أو مجرد قمامة ورسم خرائط للكائنات باستخدام الإسناد الجغرافي جزءًا من التحديات التي يتم حلها بواسطة الروبوتات الميدانية باستخدام أجهزة الاستشعار والخوارزميات. إن تفسير المعلومات في الوقت الفعلي ، مثل تحديد ماهية الحشائش باستخدام الكاميرا ، أمر معقد ويتطلب عدة أشهر من أعمال التطوير السابقة. تطلبت مهمة أخرى إزالة الأعشاب الضارة والقمامة ، حيث يلزم التحكم الدقيق بالبرمجيات للمشغلات التي تشغل الأداة. يكمن التحدي في فهم البيانات بشكل ذكي في اليوم ، والذي يتضمن قيام الروبوت بتفسير المعلومات المعطاة واتخاذ القرارات المثلى. كان التعقيد والأداء والفائدة الزراعية معايير التحكيم الرئيسية.
أشرطة الفيديو من المسابقة المتاحة
تتوفر مقاطع الفيديو عند الطلب لحدث الروبوت الميداني لمدة ثلاثة أيام ، والتي تشمل جميع المهام الميدانية المحاكاة والتعليقات من قبل الحكام ومقاطع الفيديو التي قدمتها الفرق لمهمة حرة ، على منصة DLG عبر الإنترنت كروابط منفصلة لكل يوم حدث:
8 يونيو: التنقل في حقل ذرة ذو صفوف منحنية ؛ صفوف مستقيمة بها نباتات مفقودة. لينك
9 يونيو: كشف الحشائش والأشياء والإشارة الجغرافية ؛ إزالة الرأس. لينك
10 يونيو: حدث السباحة الحرة. لينك
تتوفر التفاصيل الكاملة للفائزين في كل فئة من الفئات الخمس ونتائجهم على. https://www.fieldrobot.com/event/
تم عقد حدث الروبوت الميداني الدولي على منصة DLG الرقمية ، والتي تعد أيضًا موطنًا للأحداث الزراعية الرقمية واسعة النطاق. النظام الأساسي عبارة عن منصة اتصال توفر لمستخدميها محتوى المنتج والتفاعلات الفردية أو الجماعية أو العامة.
البحث العملي عن الروبوتات الميدانية منذ عام 2003
مسابقة الروبوتات الميدانية ، التي أطلقتها جامعة Wageningen في هولندا في عام 2003 ، تختبر الروبوتات الرائدة وتقنيات الزراعة الدقيقة في ظل ظروف العالم الحقيقي ، وتمنح العلماء الشباب الفرصة لتبادل أفكارهم وتطويرها جنبًا إلى جنب مع أقرانهم. مثل الحدث الميداني ، أتيحت الفرصة للمتسابقين في الحدث الافتراضي للتفاعل مع بعضهم البعض ومع المشاهدين الدوليين. هذا التفاعل هو جزء مهم من الحدث وساعدهم على تطوير مفاهيمهم.
قدم حدث الروبوت الميداني 2021 ، الذي أقيم في معرض DLG-Feldtage منذ عام 2014 ، اختبارات افتراضية متطلبة للروبوتات ومخترعيها ، بالإضافة إلى ترفيه مثير للمشاهدين الافتراضيين.]

{kind=link}